Mikroprocesorowe sterowanie typu SVM silnikami indukcyjnymi -moja praca magisterska
 Temat mojej pracy dyplomowej było stworzenie mikroprocesorowego sterownika który mógłby w sposób wektorowy sterować trójfazowym silnikiem indukcyjnym. Sterownik ten w założeniu miał być oparty na nisko kosztowym mikrokontrolerze 8-bitowym.
Temat mojej pracy dyplomowej było stworzenie mikroprocesorowego sterownika który mógłby w sposób wektorowy sterować trójfazowym silnikiem indukcyjnym. Sterownik ten w założeniu miał być oparty na nisko kosztowym mikrokontrolerze 8-bitowym.
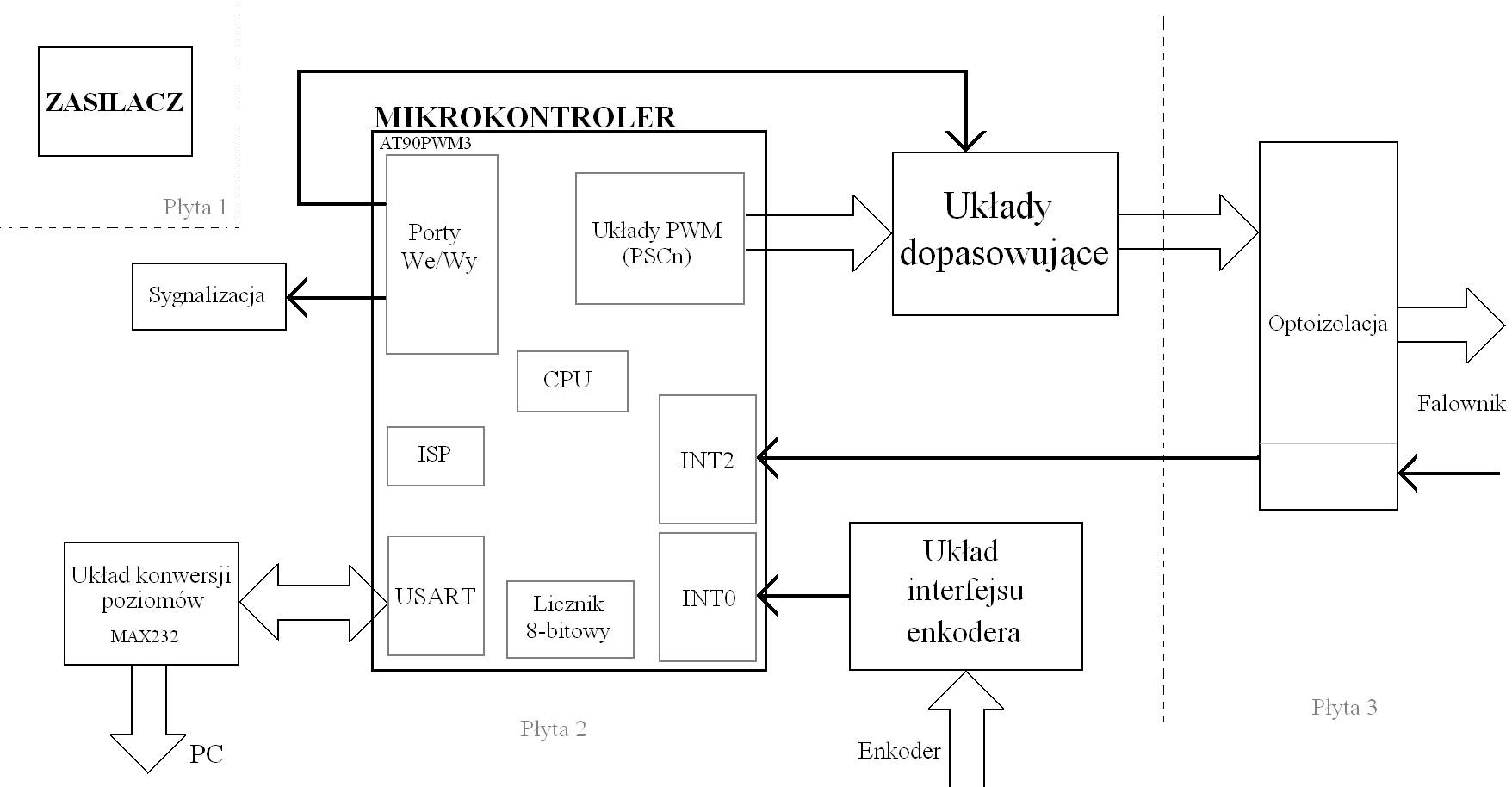
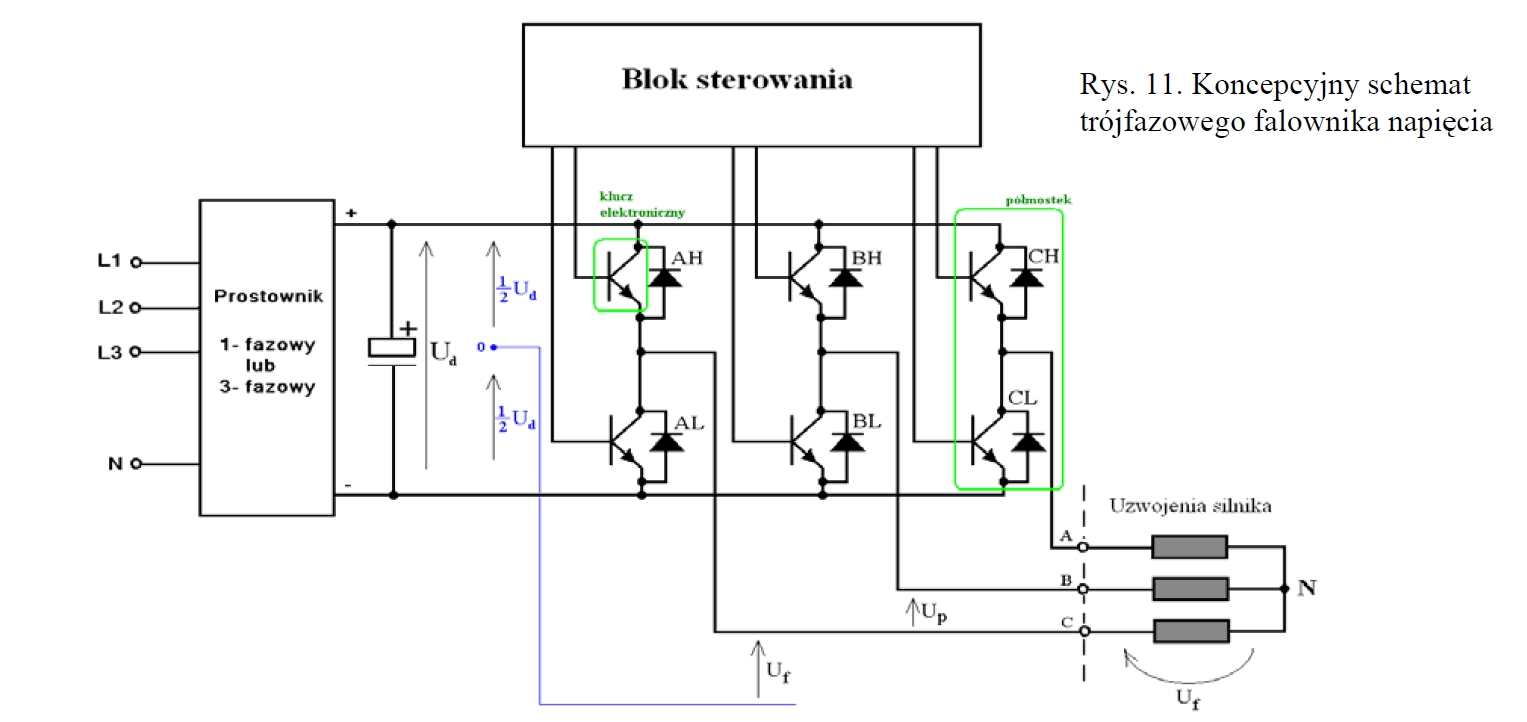
Do tego zastosowania okazał się być przydatny mikrokontroler AVR AT90PWM3. Dysponuje on trzema komplementarnymi kanałami PWM z możliwością ustalenia czasów martwych kluczy. Algorytm sterujący został oparty o notę aplikacyjną AP0803620 firmy Infieon Technologies (2005r.). Polegał on na wykorzystaniu metod tablicowych do generacji wypełnień przebiegów PWM. Program mikrokontrolera dodatkowo do sterowania silnikiem wykorzystywał charakterystykę U/f silnika z podbiciem napięcia dla niskich prędkości obrotowych(generowanych częstotliwości). Sterownik komunikował się z komputerem PC po RS232. Aplikacja na PC sterowała prędkością obrotową oraz zwrotnie ją mierzyła rysując jej wykres w czasie.
Poniżej zestawiono blokowy schemat urządzeń.
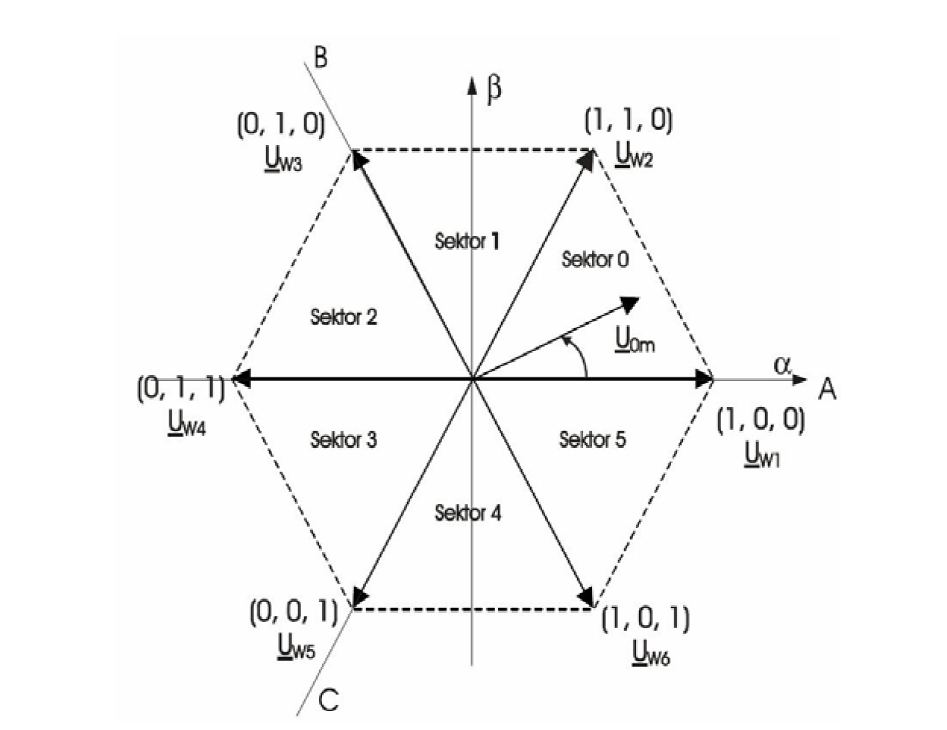
Odwzorowanie możliwych stanów wyjściowych falownika na płaszczyźnie zespolonej α-β:
Przebiegi uśrednione uzyskane metodą modulacji wektora przestrzennego: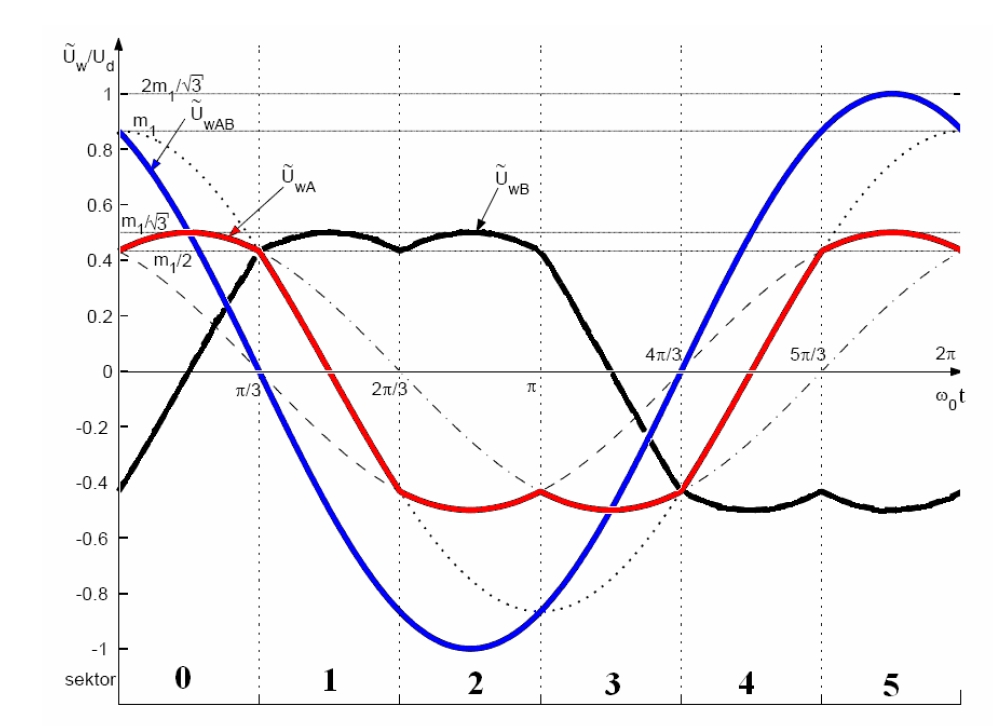
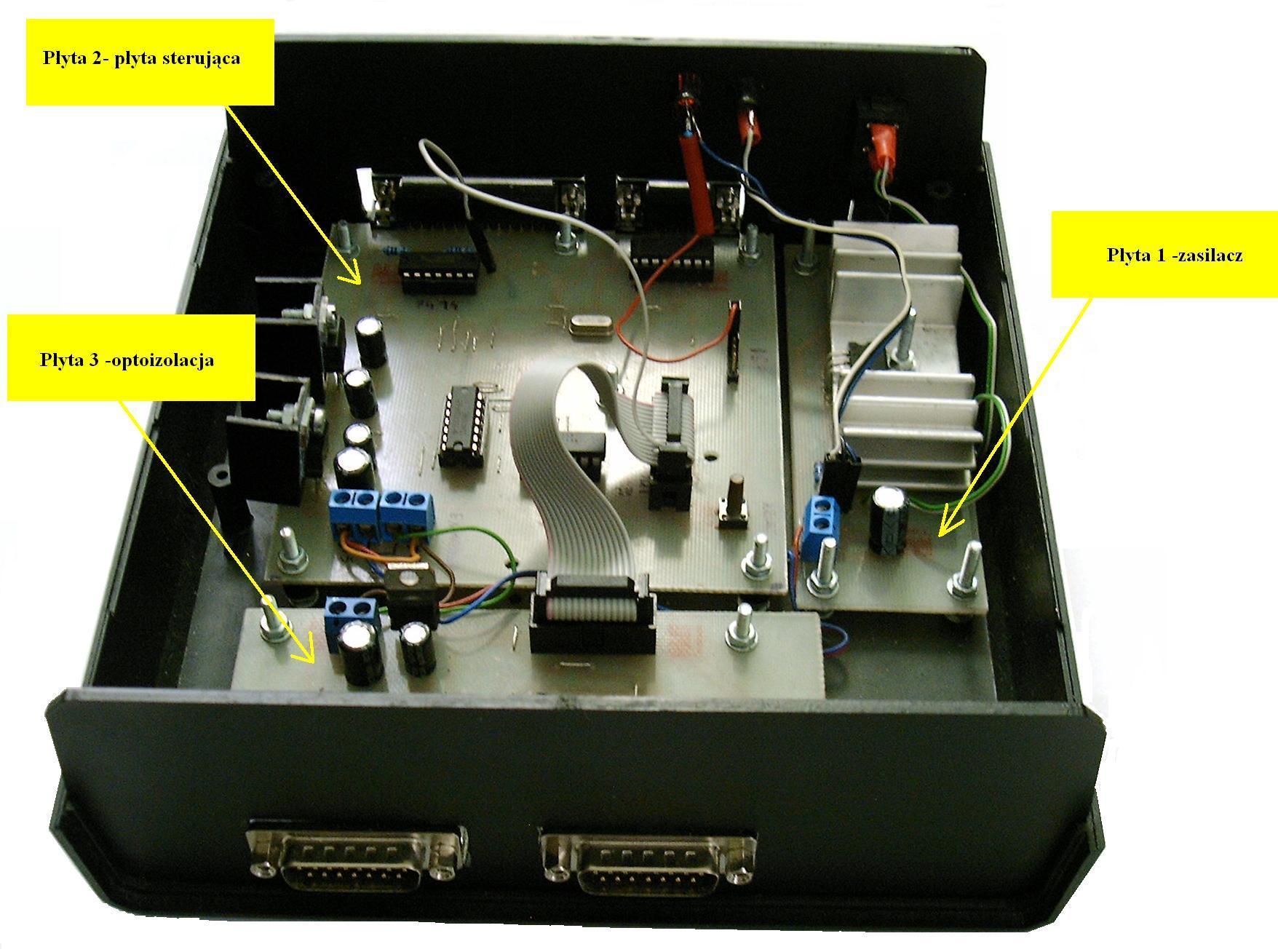
Poniższe zdjęcie przedstawia sterownik mikroprocesorowy falownika:
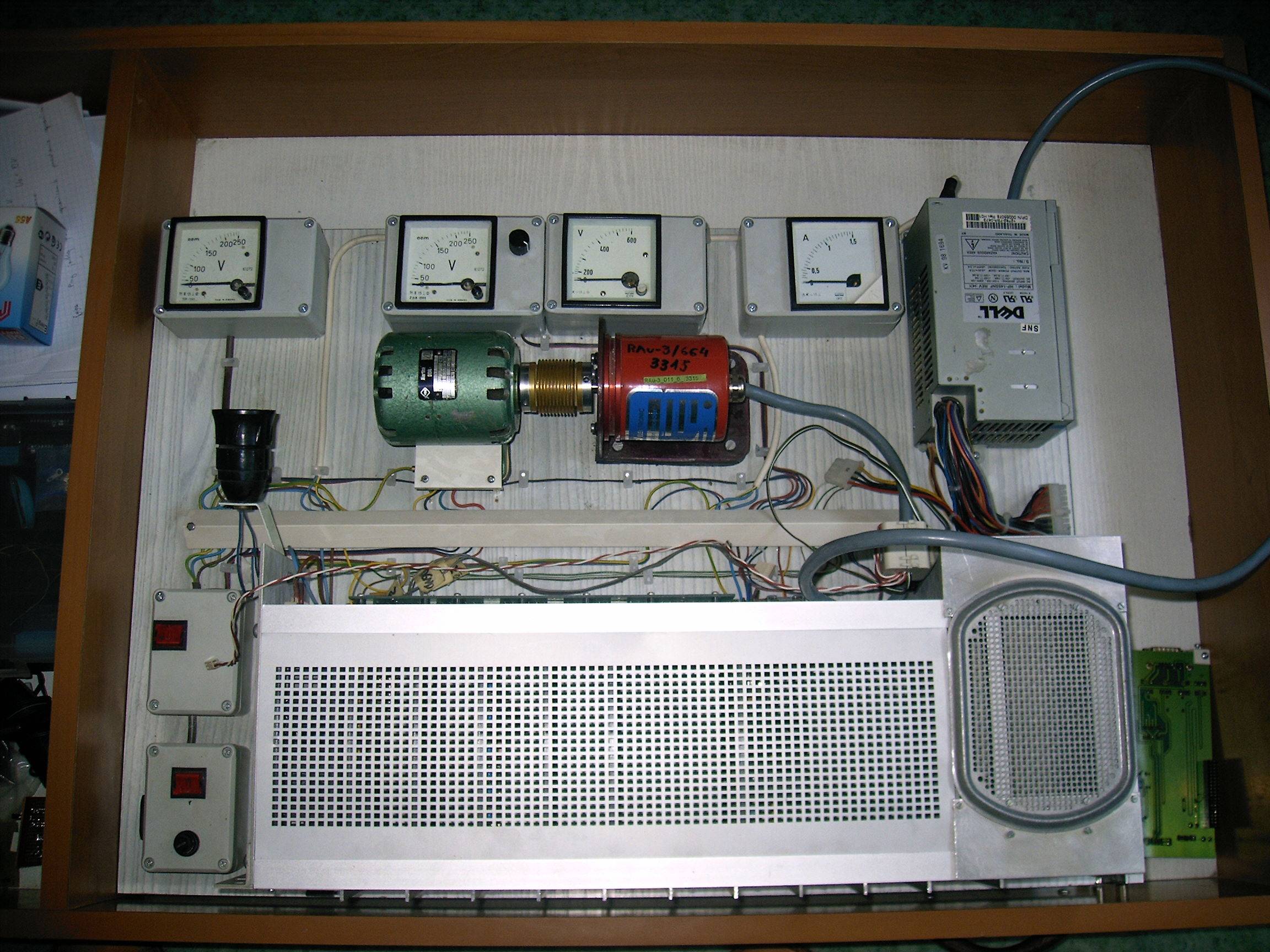
Poniższa fotografia przedstawia zestaw służący do testowania sterownika. Zestaw wyposażony był w falownik napięcia zasilany z 230V, silnik jednofazowy, enkoder oraz zasilacz. Dodatkowo zestaw wyposarzony był w woltomierze napięć fazowych i międzyfazowych oraz amperomierz mierzący pobór prądu przez silnik.
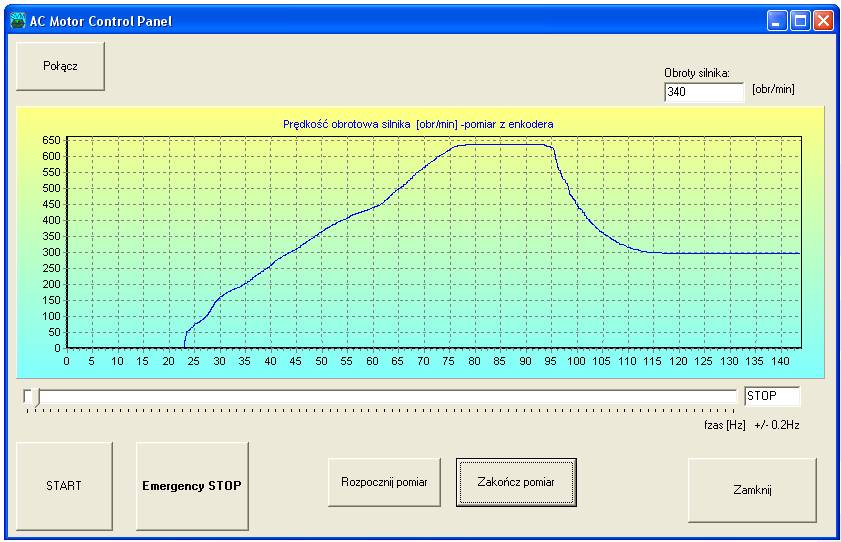
Poniżej prezentuje wygląd aplikacji napisanej w C++ służącej do komunikacji ze sterownikiem.
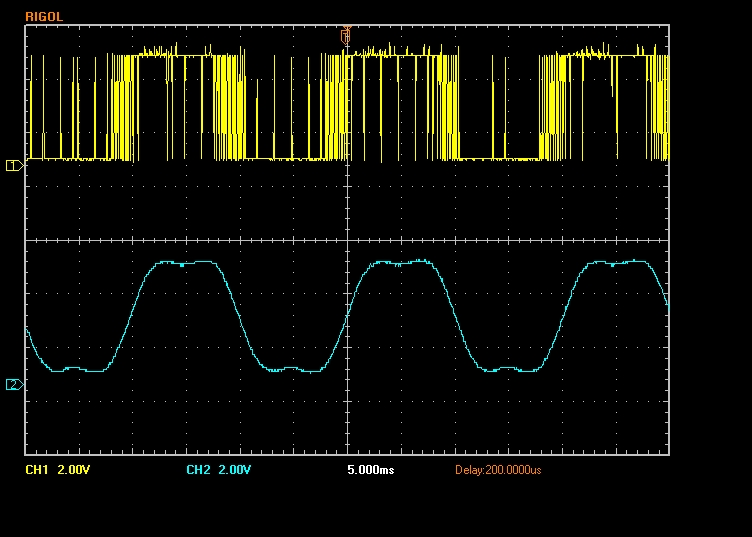
Poniżej zamieszczono oscylogram nieodfiltrowanego i odfiltrowanego na filtrze dolno-przepustowym napięcia fazowego:
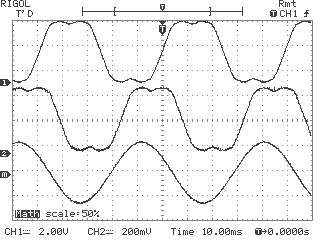
Poniżej prezentuje odfiltrowane przebiegi fazowe i międzyfazowy(uzyskany matematycznie przez oscyloskop):
Poniższy film przedstawia działanie sterownika zobrazowane za pomocą oscyloskopu: